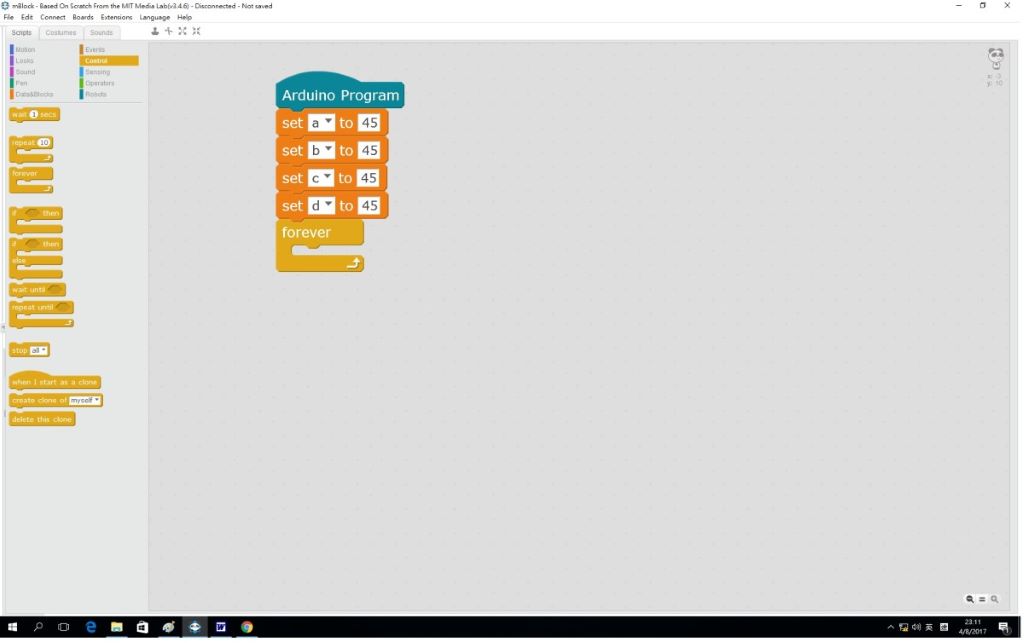
Step 4:重覆上述三個步驗,加入 x、y、q 和 w 變數,這四個變數稍後用作代入控制桿移動的讀數。
[/double_paragraph] [/row]
[row][double_paragraph]
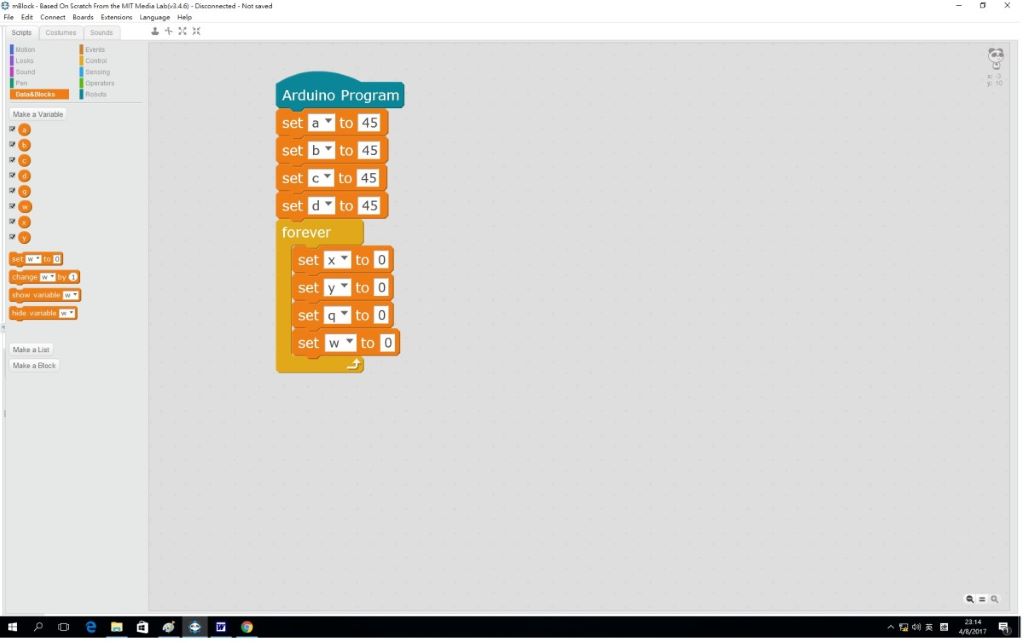
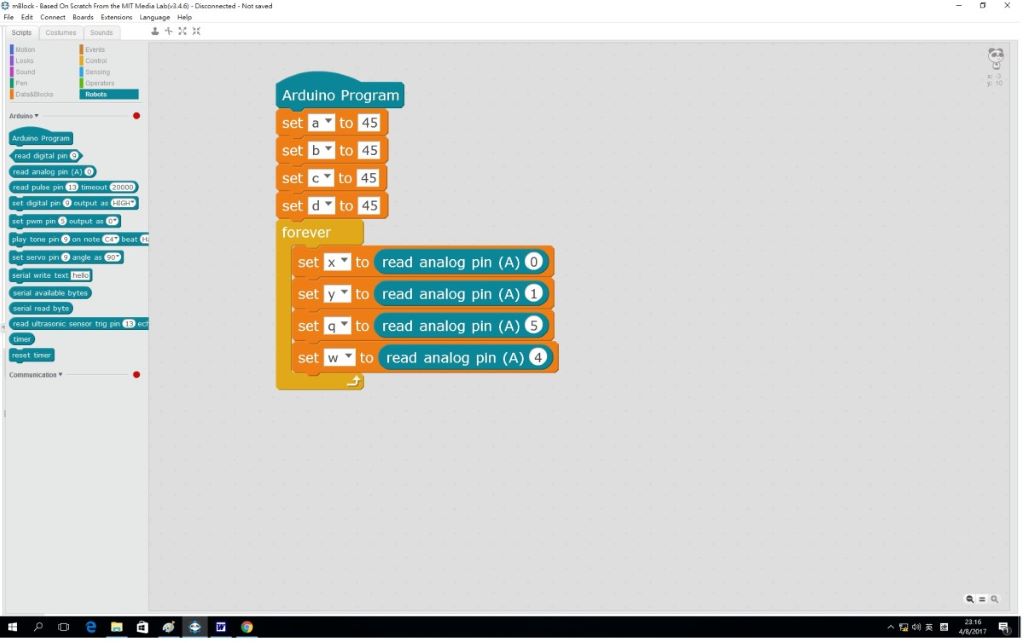
Step 5:接著於左上方的「 Robot 」下拉出「 read analog pin (A) 」方塊,如圖顯示把方塊分別放入所設定的 x、y、q 和 w 變數, 再把對應的數字按序改為 0、1、5 和 4,即代表用 x 代表 A0 的讀數,y 代表 A1 的讀數,q 代表 A5 的讀數,w 代表 A4 的讀數。
[/double_paragraph][double_paragraph]
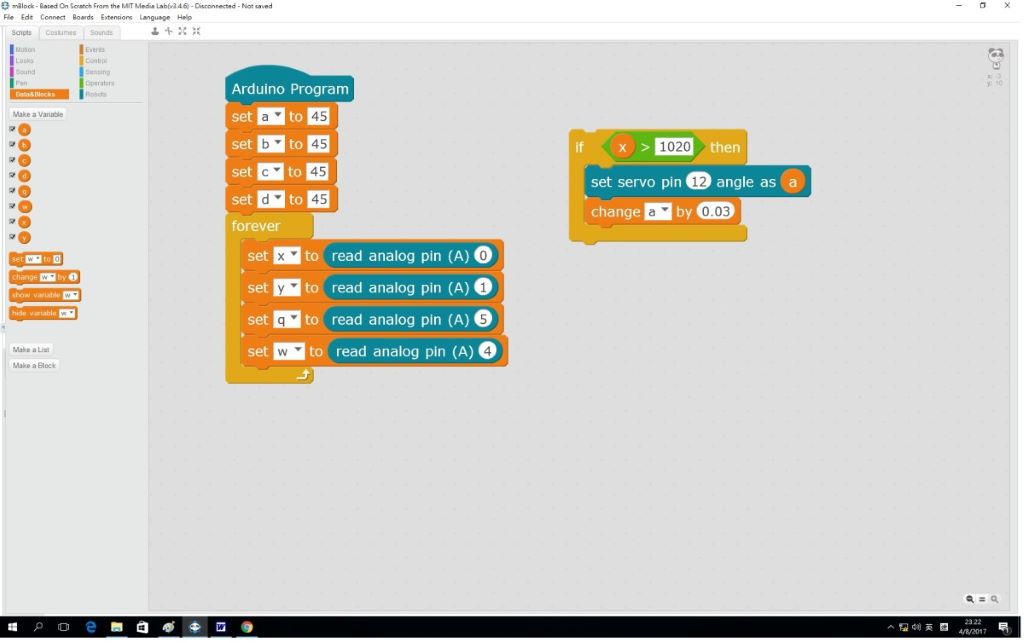
Step 6:「 Control 」下拉出「 if then 」方塊,然後到左上方的「 Operators 下拉出「 > 」方塊。左邊空格放入變數 x ,右邊輸入 1020 ,表示當控制桿變數 x 大於 1020 時就進行任務,由於控制桿讀數範圍是由 0 至 1025 ,當控桿高於 1020 即接近到達控制桿的另一端。
[/double_paragraph] [/row]
[row][double_paragraph]
Step 7:「 Robot 」下拉出「 set servo pin 」方塊,把 pin9 更改為 pin12 ,並於「 Data&Blocks 」下拉出「 change a by 」,把 1 改為 0.03 。此段方塊代表控制桿變數 x 大於 1020 時, pin12 的伺服馬達會每次增加 0.03 度。
[/double_paragraph][double_paragraph]
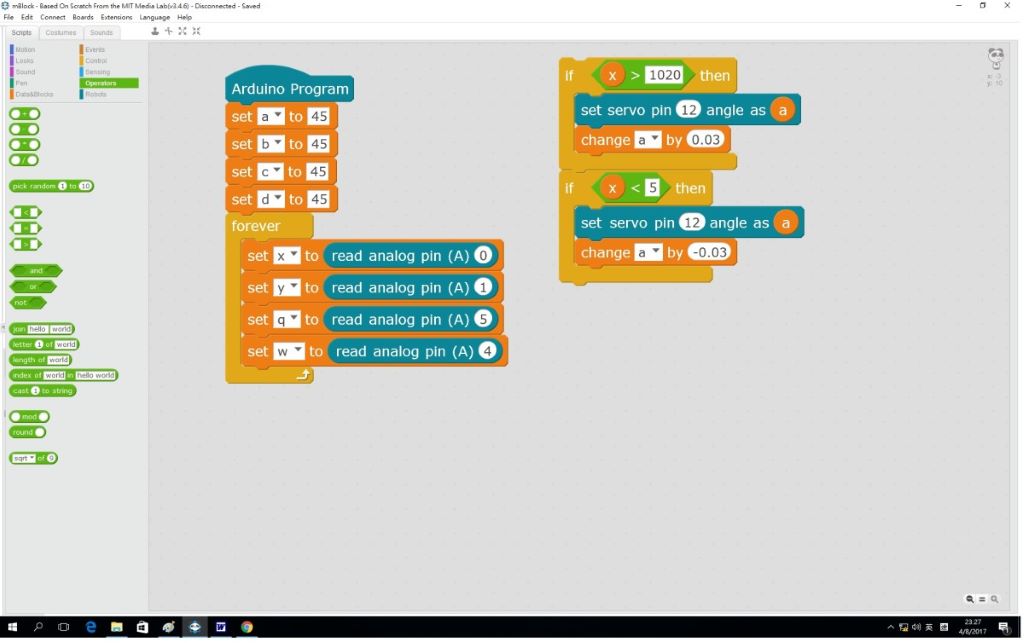
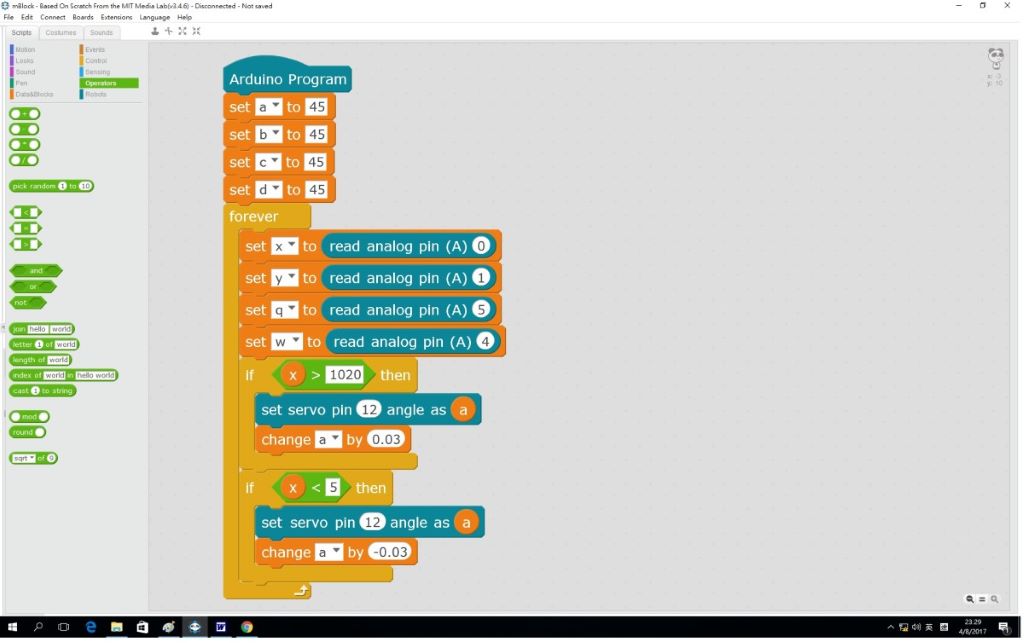
Step 8:複製上述 if then 方瑰,把六角形方塊換為 x 少於 5 , 0.03 改為 -0.03 。此段方塊代表如控制桿變數 x 少於 5, pin12 的伺服馬達會每次減速 0.03 度。









{kind=link}